Electronic kits and parts - build, code, and learn!
In stock
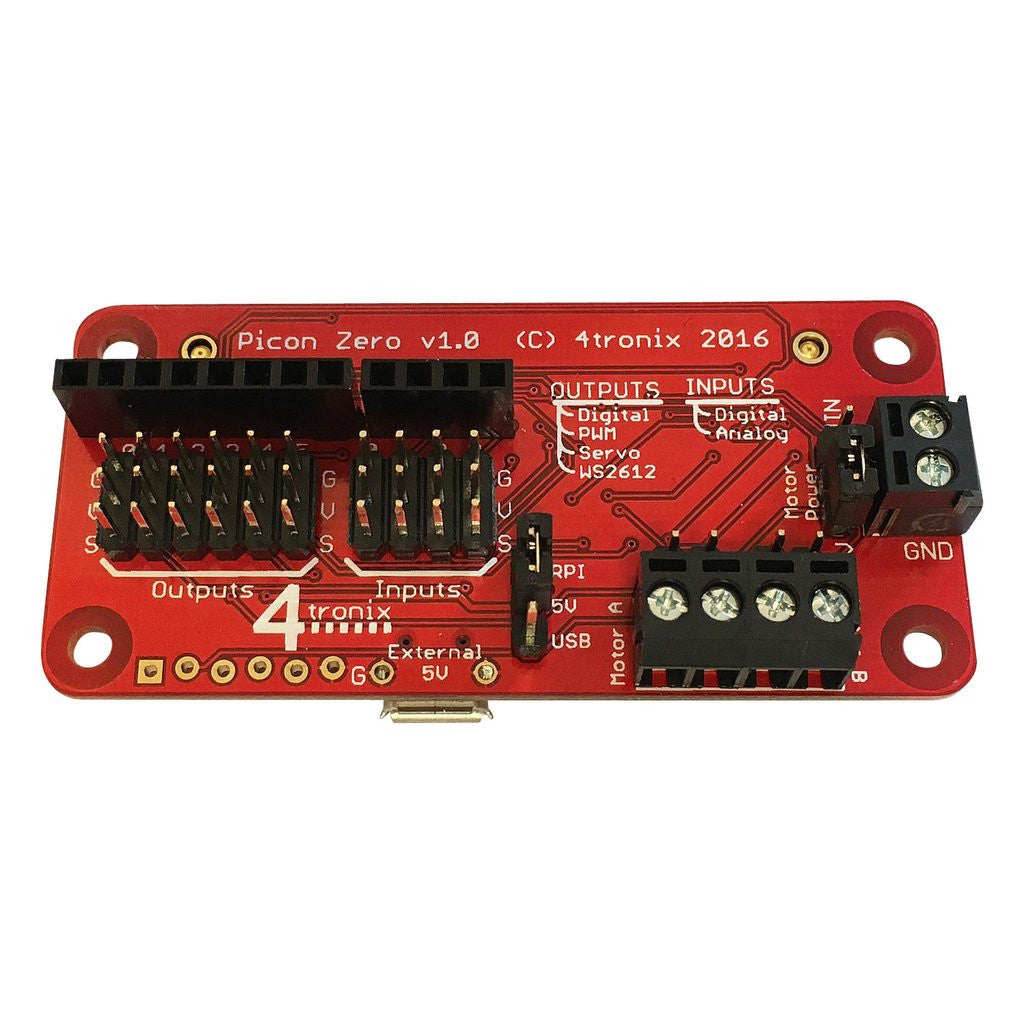
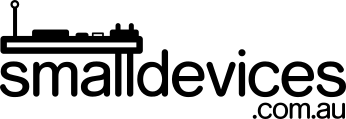
Picon Zero is an Intelligent robotics controller for your Raspberry Pi based mobile robot. A built-in processor handles all the direct communication with your input and output devices, leaving you to worry about the overall control with your Raspberry Pi program.
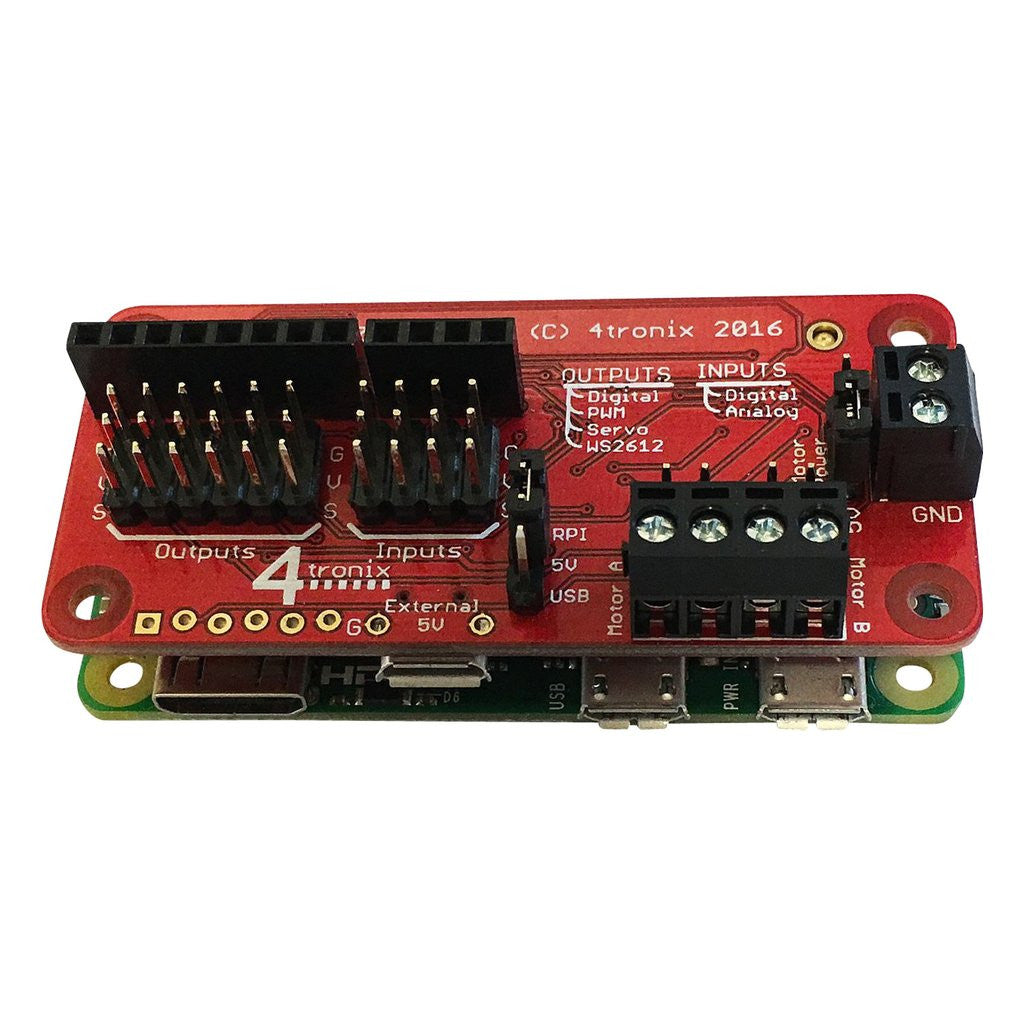
As well as 2 full H-Bridge motor drivers, the Picon Zero has a number of Input and Output pins that can be configured in a variety of ways, allowing you to easily add analog inputs or neopixel outputs to your Raspberry Pi without any complicated software and kernel specific drivers. It also provides an interface for an HC-SR04 ultrasonic distance sensor (not included) and opens up 5 GPIO pins from the Raspberry Pi for you to use as you see fit.
Features:
This controller board is supplied fully assembled. No soldering is required.
More information, software and examples can be found here
* 5 of the GPIO pins are available on a female header. To access the others you will need to attach directly to the GPIO pins
It has done me good, it took me a short while but it got my project to live, the only downside is that it's python code fails to debug correctly but runs fine, also the code examples seem to be getting old (had to update)
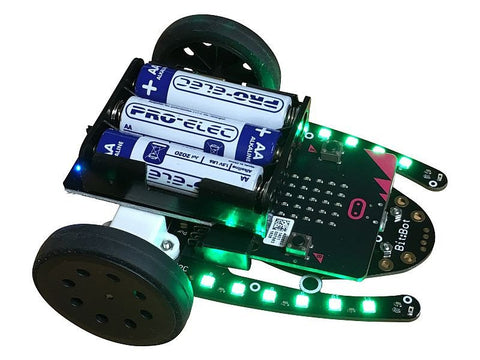
Bit:Bot v1.2 micro:bit Robot + Ultrasonic Sensor
Regular price $64.95 Sale price $44.55
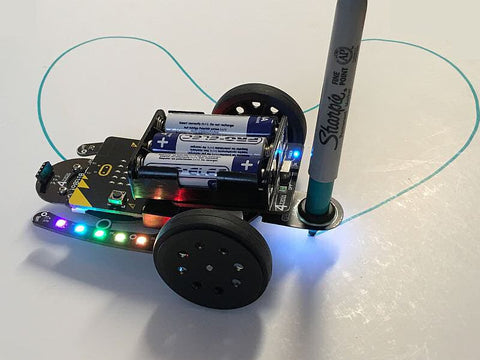
4Tronix Bit:Bot Pen Holder
From $5.70
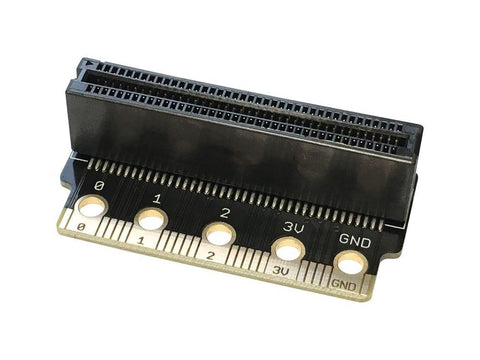
4Tronix Angle:Bit - Turn your BBC Micro:Bit by 90 Degrees (AngleBit for MicroBit)
Regular price $11.15
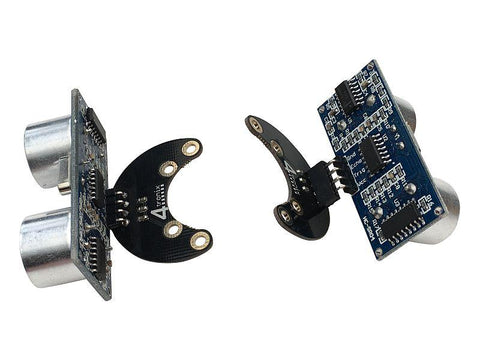
Ultrasonic Distance Sensor for Bit:Bot
Regular price $7.10